BlueROV2 Setup & Real-Time Deployment
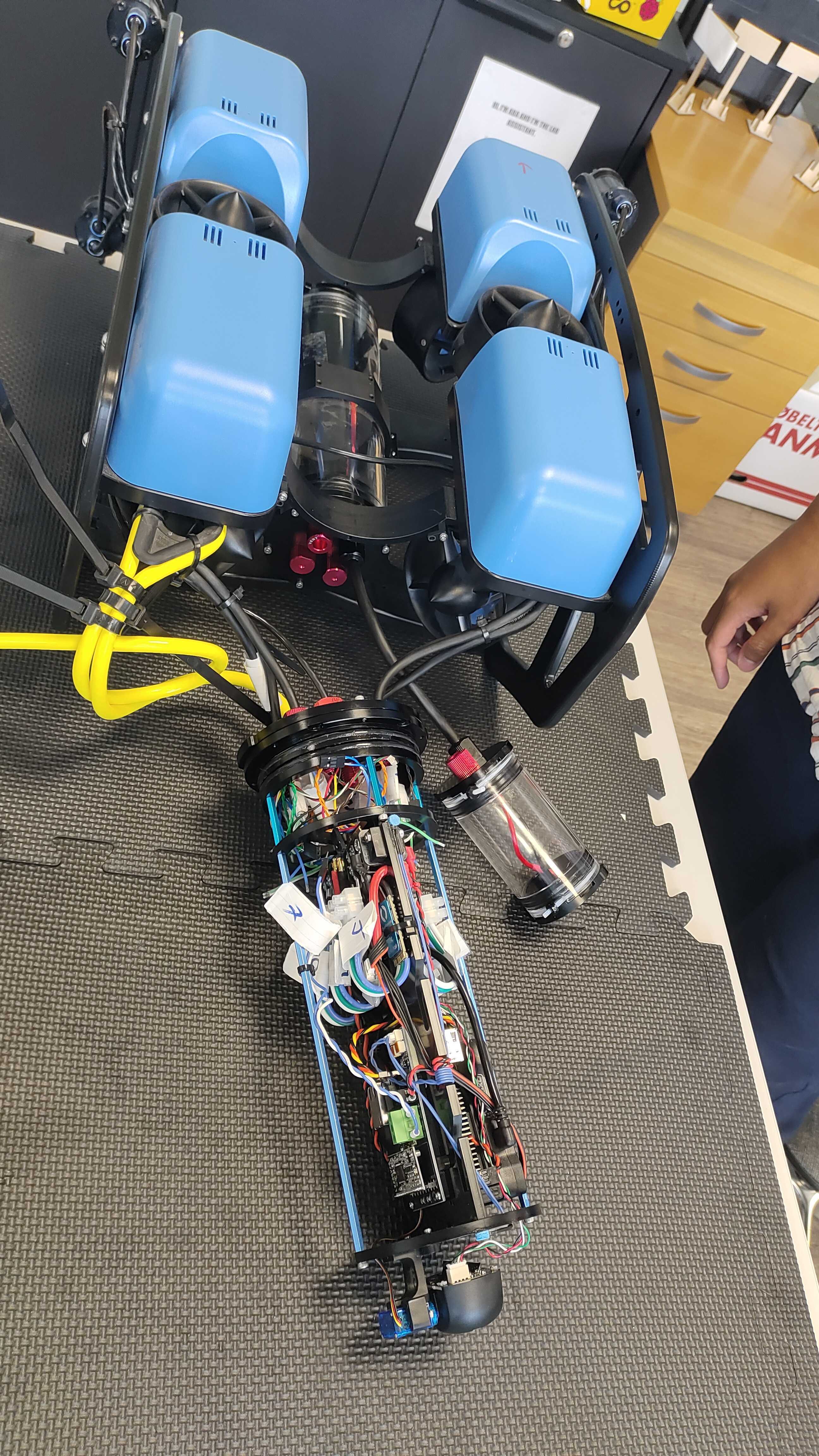
This project demonstrates the complete setup, configuration, and deployment of the BlueROV2 underwater robot. Using the official BlueRobotics documentation as a reference, the robot was configured for real-time underwater control, visual feedback, and future autonomous upgrades via ROS2 and AI-based models. The project establishes a strong baseline for future research in underwater species detection and inspection missions.
The setup followed step-by-step instructions from the official BlueROV2 guide, covering both software and hardware integration:
- Flashed the Pixhawk flight controller with the ArduSub firmware.
- Configured the Raspberry Pi companion computer for MAVLink communication.
- Installed and connected QGroundControl (QGC) on the surface laptop.
- Established network bridge over tether via Ethernet.
- Calibrated all sensors, actuators, and camera feed.
- Enabled control via Xbox remote controller.
Reference followed: BlueROV2 Software Setup Guide

- Successfully piloted BlueROV underwater using Xbox gamepad in real-time.
- Live camera feed displayed via QGroundControl on surface laptop.
- All thrusters and sensors functional with smooth communication between onboard and surface systems.
This project sets the foundation for advanced underwater autonomy by combining ROS2 and AI-based perception tools:
- Live object detection: Use camera feed with custom YOLO models for underwater species detection or visual surveillance.
- ROS2 Integration: Develop and deploy high-level control nodes on Raspberry Pi using MAVROS for custom flight modes.
- Mission-specific modes: Future extension includes creating and triggering ROS2-based missions directly via the controller or remote interface.
- Pixhawk (ArduSub firmware): Handles motor control, sensor fusion, and safety logic.
- Raspberry Pi: Companion computer for high-level computing, network routing, and future ROS2 tasks.
- QGroundControl: Visual interface for telemetry, video, sensor data, and manual operation.
- MAVROS (Planned): Middleware to bridge ROS2 and MAVLink-based Pixhawk control.
Conclusion
By following the official BlueROV2 configuration process and integrating all required components, the robot was successfully made water-ready and controllable in real time. The system enables reliable remote control and live feedback via QGC and Xbox controller. Looking ahead, the integration with ROS2 and AI-based computer vision tools like YOLO paves the way for intelligent underwater perception and autonomy—supporting research missions, inspection, and exploration.